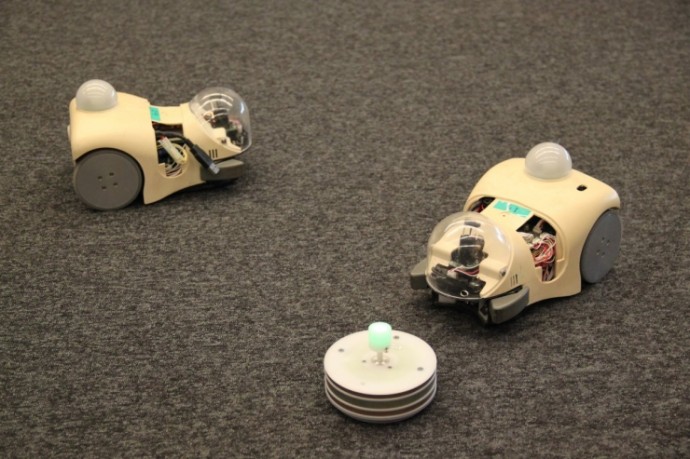
Okinawa Institute of Science and Technology (OIST, Japón) ha empleado robots para sus investigaciones sobre la evolución. Stefan Elfwing, investigador de la Unidad de Computación Neuronal, utilizó con éxito una colonia de robots parecidos a roedores para observar cómo evolucionan a través de diferentes estrategias de apareamiento.
Explican en Tendencias21 que los robots adoptan distintos comportamientos cuando tienen que elegir entre el alimento y esperar que otro robot se dé la vuelta para aparearse, y en eso se basó este experimento.
Las estrategias
Los machos y las hembras de diferentes especies tienen diferentes estrategias de captación y selección de compañeros de apareamiento. La teoría evolutiva establece que sólo un fenotipo diferenciado, en este caso referido a la estrategia de apareamiento, debe existir dentro de una población; pero en la naturaleza hay múltiples formas de apareamiento dentro de una población, lo que se ha convertido en un tema de debate para todos los científicos de OIST.
Con la implementación de robots y las simulaciones por ordenador fue posible ver la evolución de más de mil generaciones en un corto período de tiempo, algo que es imposible de hacer en animales vivos, demostrando la importancia que tiene la tecnología para el estudio de los fenómenos naturales.
El experimento
Para el experimento se realizó una simulación por ordenador, por lo que se programó una manada de robots roedores con ruedas, cámaras, dientes de electrodos y puertos de infrarrojo para el apareamiento. Estos tenían dos comportamientos: buscar alimento en forma de baterías y una pareja para aparearse.
Los robots sólo podían aparearse unos con otros si se veían de frente. En el caso de que un robot viera tanto una batería como la parte trasera de otro robot, pueden surgir dos fenotipos principales de estrategias de apareamiento: un robot tipo Forrajero (va hacia la batería y nunca espera a que la pareja se dé la vuelta para el apareamiento), y un robot tipo Rastreador (espera a que la pareja se dé la vuelta para el apareamiento).
El resultado de algunos de los 70 experimentos fue que la población era polimórfica, y que dos estrategias de apareamiento diferentes, o fenotipos, co-existían dentro de ella, se observó que la mezcla estable era de 25% de Forrajeros y 75% de Rastreadores.
Las conclusiones
Los experimentos demostraron que hay diversas formas de apareamiento, que no implica que una sea superior que la otra, sino que debe darse la que brinde mayor oportunidad a la especie de reproducirse o proliferarse.
En algunos experimentos una de las estrategias evolucionaba dentro de la población; en otros, se desarrollaron poblaciones polimórficas, en las que los robots demostraron los mejores resultados rapidez para la reproducción de todos los experimentos. Elfwing, satisfecho con los resultados, estableció:
«En este experimento, los robots eran hermafroditas: todos los robots se aparean con todos los demás y pueden producir descendencia. En la siguiente etapa, queremos ver si los robots asumen roles de hombre y mujer, mediante la adopción de diferentes riesgos y costes de reproducción. El comportamiento exhibido por las dos estrategias, Forrajero y Rastreador, puede ser un precursor de la adopción de géneros distintos».
Periodista. Mezclo #tecnologia y ciencia que mejora la vida de las personas!